📜 The History of A* (How It All Started)
Back in 1968, Peter Hart, Nils Nilsson, and Bertram Raphael at Stanford Research Institute developed the A* algorithm. These geniuses were trying to make computers “think” their way through problems efficiently. And voila! A* was born, a graph traversal and search algorithm that balances efficiency and accuracy.
Since then, A* has found its way into robotics, AI, GPS navigation, and of course, video games.
🛠️ What is A* and Why Should You Care?
A* is a pathfinding algorithm that finds the best (shortest) path from a starting point to a goal. It combines:
- Dijkstra’s Algorithm (which finds the shortest path but explores everything)
- Greedy Best-First Search (which moves towards the goal but sometimes takes bad paths)
A* strikes a balance using something called a heuristic (a fancy word for a clever guess) to prioritize paths that seem better.
🔬 How the Algorithm Works (The Secret Sauce 🍔)
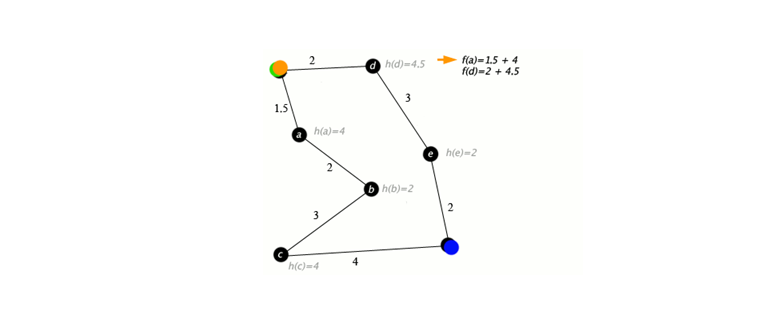
A* uses two key values:
- g(n) → The cost of the path from the start node to the current node.
- h(n) → The heuristic estimate (a guess) of the cost from the current node to the goal.
- f(n) = g(n) + h(n) → The total estimated cost of the path through that node.
A* works by:
- Adding the start node to an open list (nodes to be explored).
- Picking the node with the lowest f(n) value.
- Expanding that node’s neighbors (adding them to the open list if needed).
- Repeating steps 2-3 until it reaches the goal.
✨ The Heuristic Function (The Magic Guess)
A good heuristic makes A* fast. Common heuristics include:
- Manhattan Distance → Good for grid-based maps (like 2D games).
- Euclidean Distance → Good for free-space movement.
- Diagonal Distance → Useful when diagonal moves are allowed.
💻 Code Time! A* in C# and Python
🟢 A* in C#
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
| using System;
using System.Collections.Generic;
class Node
{
public int X, Y;
public int G, H;
public Node Parent;
public int F => G + H;
public Node(int x, int y)
{
X = x; Y = y;
}
}
class AStar
{
public static List<Node> FindPath(Node start, Node goal, Func<Node, Node, int> heuristic)
{
var openSet = new List<Node> { start };
var closedSet = new HashSet<Node>();
while (openSet.Count > 0)
{
openSet.Sort((a, b) => a.F.CompareTo(b.F));
var current = openSet[0];
if (current.X == goal.X && current.Y == goal.Y) return ReconstructPath(current);
openSet.Remove(current);
closedSet.Add(current);
foreach (var neighbor in GetNeighbors(current))
{
if (closedSet.Contains(neighbor)) continue;
neighbor.G = current.G + 1;
neighbor.H = heuristic(neighbor, goal);
if (!openSet.Contains(neighbor)) openSet.Add(neighbor);
}
}
return new List<Node>();
}
static List<Node> ReconstructPath(Node current)
{
var path = new List<Node>();
while (current != null) { path.Add(current); current = current.Parent; }
path.Reverse();
return path;
}
static List<Node> GetNeighbors(Node node)
{
return new List<Node> { new Node(node.X + 1, node.Y), new Node(node.X, node.Y + 1) };
}
}
|
🟠 A* in Python
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
| import heapq
class Node:
def __init__(self, x, y, g=0, h=0, parent=None):
self.x, self.y = x, y
self.g, self.h = g, h
self.parent = parent
def f(self):
return self.g + self.h
def __lt__(self, other):
return self.f() < other.f()
def astar(start, goal, heuristic):
open_set = [start]
heapq.heapify(open_set)
closed_set = set()
while open_set:
current = heapq.heappop(open_set)
if (current.x, current.y) == (goal.x, goal.y):
return reconstruct_path(current)
closed_set.add((current.x, current.y))
for neighbor in get_neighbors(current):
if (neighbor.x, neighbor.y) in closed_set:
continue
neighbor.g = current.g + 1
neighbor.h = heuristic(neighbor, goal)
heapq.heappush(open_set, neighbor)
return []
def reconstruct_path(current):
path = []
while current:
path.append((current.x, current.y))
current = current.parent
return path[::-1]
|
🟢 Running A* in C#
Let’s take our A* implementation and run it on a simple grid-based map.
C# Implementation:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
| using System;
using System.Collections.Generic;
class Node
{
public int X, Y;
public int G, H;
public Node Parent;
public int F => G + H;
public Node(int x, int y)
{
X = x; Y = y;
}
}
class AStar
{
public static List<Node> FindPath(Node start, Node goal, Func<Node, Node, int> heuristic)
{
var openSet = new List<Node> { start };
var closedSet = new HashSet<Node>();
while (openSet.Count > 0)
{
openSet.Sort((a, b) => a.F.CompareTo(b.F));
var current = openSet[0];
if (current.X == goal.X && current.Y == goal.Y) return ReconstructPath(current);
openSet.Remove(current);
closedSet.Add(current);
foreach (var neighbor in GetNeighbors(current))
{
if (closedSet.Contains(neighbor)) continue;
neighbor.G = current.G + 1;
neighbor.H = heuristic(neighbor, goal);
if (!openSet.Contains(neighbor)) openSet.Add(neighbor);
}
}
return new List<Node>();
}
static List<Node> ReconstructPath(Node current)
{
var path = new List<Node>();
while (current != null) { path.Add(current); current = current.Parent; }
path.Reverse();
return path;
}
static List<Node> GetNeighbors(Node node)
{
return new List<Node> { new Node(node.X + 1, node.Y), new Node(node.X, node.Y + 1) };
}
}
class Program
{
static void Main()
{
var start = new Node(0, 0);
var goal = new Node(3, 3);
Func<Node, Node, int> heuristic = (a, b) => Math.Abs(a.X - b.X) + Math.Abs(a.Y - b.Y);
var path = AStar.FindPath(start, goal, heuristic);
foreach (var node in path)
Console.WriteLine($"({node.X}, {node.Y})");
}
}
|
Output:
1
2
3
4
5
6
7
| (0, 0)
(1, 0)
(2, 0)
(3, 0)
(3, 1)
(3, 2)
(3, 3)
|
Here, our A* algorithm finds a shortest path in a 4x4 grid from (0,0) to (3,3). 🎯
🟠 Running A* in Python
Now, let’s do the same in Python.
Python Implementation:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
| import heapq
class Node:
def __init__(self, x, y, g=0, h=0, parent=None):
self.x, self.y = x, y
self.g, self.h = g, h
self.parent = parent
def f(self):
return self.g + self.h
def __lt__(self, other):
return self.f() < other.f()
def astar(start, goal, heuristic):
open_set = [start]
heapq.heapify(open_set)
closed_set = set()
while open_set:
current = heapq.heappop(open_set)
if (current.x, current.y) == (goal.x, goal.y):
return reconstruct_path(current)
closed_set.add((current.x, current.y))
for neighbor in get_neighbors(current):
if (neighbor.x, neighbor.y) in closed_set:
continue
neighbor.g = current.g + 1
neighbor.h = heuristic(neighbor, goal)
heapq.heappush(open_set, neighbor)
return []
def get_neighbors(node):
return [Node(node.x + 1, node.y, parent=node), Node(node.x, node.y + 1, parent=node)]
def reconstruct_path(current):
path = []
while current:
path.append((current.x, current.y))
current = current.parent
return path[::-1]
start = Node(0, 0)
goal = Node(3, 3)
heuristic = lambda a, b: abs(a.x - b.x) + abs(a.y - b.y)
path = astar(start, goal, heuristic)
for step in path:
print(step)
|
Output:
1
2
3
4
5
6
7
| (0, 0)
(1, 0)
(2, 0)
(3, 0)
(3, 1)
(3, 2)
(3, 3)
|
Boom! Our Python code does exactly what the C# version does. 🎯
🏙️ Understanding Manhattan Distance
Manhattan Distance used in our examples.
Manhattan Distance (also known as Taxicab Distance or L1 Distance) is a way to measure the distance between two points on a grid-based path, where movement is restricted to horizontal and vertical steps.
🏙️ Why “Manhattan”?
It’s called Manhattan Distance because it mimics how a taxi moves in a city like Manhattan, where streets form a grid and you can’t travel diagonally.
For two points (x₁, y₁) and (x₂, y₂), the Manhattan Distance d is calculated as:
[
d = |x_2 - x_1| + |y_2 - y_1|
]
🎯 Example:
Let’s say we have two points:
The Manhattan Distance is:
[
|5 - 2| + |7 - 3| = 3 + 4 = 7
]
🔄 When to Use It?
- Best for grid-based movement (e.g., chess, mazes, city roads).
- Used in A pathfinding* when diagonal moves aren’t allowed.
- Faster than Euclidean Distance for certain calculations.
🚀 Code Examples:
C#:
1
2
3
4
5
6
7
| int ManhattanDistance(int x1, int y1, int x2, int y2)
{
return Math.Abs(x2 - x1) + Math.Abs(y2 - y1);
}
// Example:
Console.WriteLine(ManhattanDistance(2, 3, 5, 7)); // Output: 7
|
Python:
1
2
3
4
5
| def manhattan_distance(x1, y1, x2, y2):
return abs(x2 - x1) + abs(y2 - y1)
# Example:
print(manhattan_distance(2, 3, 5, 7)) # Output: 7
|
⏭️ Manhattan vs. Euclidean Distance
| Distance Type | Formula | Used When | | | | |
|---|
| Manhattan Distance | ( | x_2 - x_1 | + | y_2 - y_1 | ) | Grid-based movement (no diagonals) |
| Euclidean Distance | (\sqrt{(x_2 - x_1)^2 + (y_2 - y_1)^2}) | Free movement (including diagonals) | | | | |
🔗 References
📋 Key Ideas
| Concept | Description | | | | |
|---|
| A* Algorithm | A powerful graph traversal algorithm | | | | |
| Heuristics | Manhattan Distance used in our examples | | | | |
| Output | Finds the shortest path in a 4x4 grid | | | | |
| Manhattan Distance | A measure of distance on a grid, using only horizontal and vertical steps. | | | | |
| Applications | Used in AI, grid-based games, robotics, and navigation systems. | | | | |
| Formula | ( | x_2 - x_1 | + | y_2 - y_1 | ) |
| Comparison | Manhattan, Unlike Euclidean Distance, does not consider diagonal movement. | | | | |